
CONTENTS
プロジェクトの突破口
創造力でリスクを洗い出す開発のいま、そして未来
「アンフィニソレイユ」が求められる場所を探して建機、農機、ロボットへと展開開発者の横顔
安全技術向上と“めぐり合い”の好機に



概要
INTRODUCTION
安全について突き詰めるプロジェクト
生活のあらゆる場面において自動で動くロボットや機械を、よりいっそう活用しようという動きが活発になっています。そこでNEDOは、ロボットの安全基準や安全評価手法の確立を目指すため、「生活支援ロボット実用化プロジェクト」(2009~2013年度)を実施しました。鉄道信号などで知られる日本信号株式会社は、鉄道駅のホームドアなどに実装されている同社独自に開発したMEMS光スキャナによる3D距離画像センサ「アンフィニソレイユ」の改良研究で、本プロジェクトの車いす搭乗型ロボットの研究開発に参加しました。安全を見極めるためにロボットの「目」の役割を果たすことを「アンフィニソレイユ」に期待されてのことでした。日本信号は、プロジェクトを通して、そもそも「安全」とは何かを定義づけるところから困難な研究課題に取り組み、その成果を「アンフィニソレイユ」の現行製品に反映しました。
開発への道
BEGINNING
MEMS光スキャナの研究開発が生んだ、独自の3D距離画像センサ
現在、鉄道駅などのホームドアの安全センサとして圧倒的シェアを誇っているのが、日本信号の3D距離画像センサの「アンフィニソレイユ」(写真1)です。元々、同社が新事業分野への進出を模索する中で生まれた製品でした。
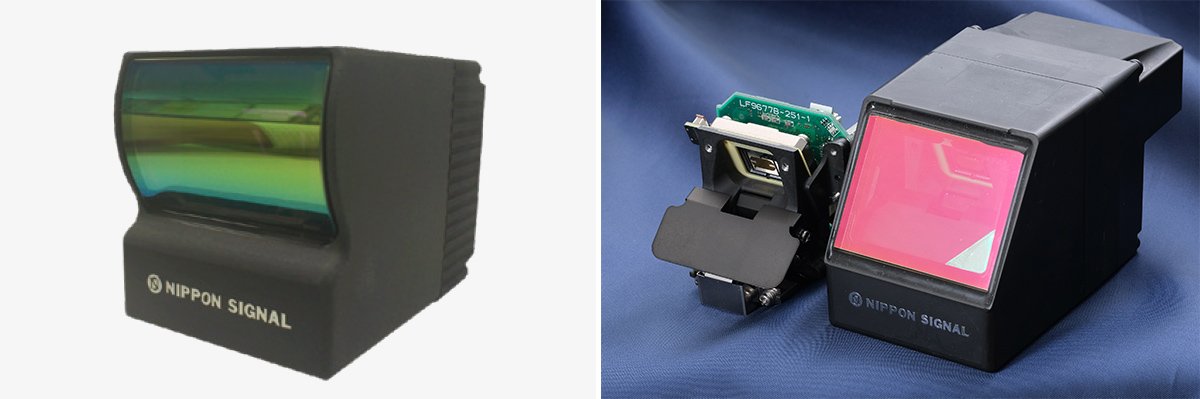
写真1 日本信号の3D距離画像センサ「アンフィニソレイユ」(左・プロジェクト当時の「FX8」、右・最新型の「FX10s」の外観と内部構造 写真提供:日本信号)
日本信号では1991年頃から、鉄道の信号制御装置に使われるキーデバイス「電磁リレースイッチ」の小型・低コスト化を目的に「動く半導体」とも言える「MEMS」に注目。日本におけるMEMS研究の第一人者である東北大学の江刺正喜教授を訪ね、同教授のアイデアも得て、MEMS利用法のなかでも「光」に関わる装置の研究開発に取り組みました。
MEMSとは「微小な電気機械システム」という意味の英語「Micro Electro Mechanical Systems」の略称です。シリコン半導体基板などの上に、機械要素部品センサやアクチュエーター、電子回路などをひとまとめに配置した、半導体のように微少な装置ながらも“動く”構造を持っている装置を指します(写真2)。

写真2 小判状のミラー可動部と周囲の磁気回路から構成された部品が日本信号の開発したMEMS光スキャナ「ECO SCAN」。左右を突き通す棒のような部分を軸に、電磁力で中央部のミラーが“動く”(振動する)。単結晶シリコンによる一体形成で摺動部がなく、耐久性に優れ長寿命
日本信号宇都宮事業所スマートシティ統括技術部長でスマートセンシング技術部長でもある川崎栄嗣さんは、「ゼロから始めた研究開発も2000年頃になると、シリコン基板を使ったMEMSに対する加工技術開発が進み、このMEMSを使って何か新製品を実用化できないかと考えだしました」と話します。
「プロジェクターへの応用などいろいろトライした結果、光スキャナとしての利用が、一番将来性が高いだろうと考え、『ECO SCAN』という商品名で、MEMS光スキャナを実用化しました(図1)」(川崎さん)
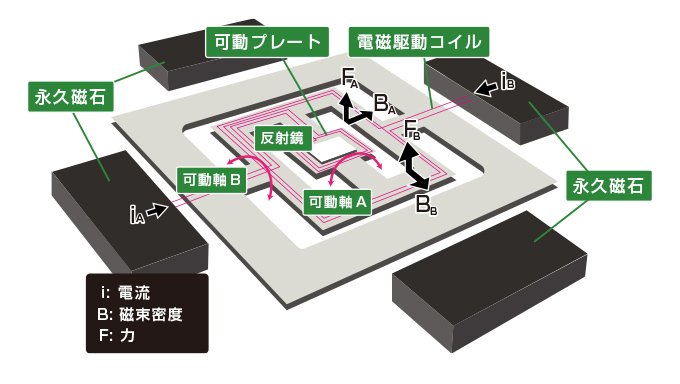
図1 「ECO SCAN」の模式図。電流が流れると永久磁石が作る磁場から力を受け、そのローレンツ力でミラーを振動させ、入ってきたレーザを走査する(資料提供:日本信号)
「そして、その『ECO SCAN』の実装例の一つが3D距離画像センサ、つまり『アンフィニソレイユ』でした」(川崎さん)
日本信号は、長年、鉄道用の信号機や自動改札機など鉄道関連機器を開発・製造・販売してきましたが、「アンフィニソレイユ」により、センサという新しい事業分野に乗り出すことになりました。
検知能力の高さで乗降客の安全を支える
「アンフィニソレイユ」は2005年に販売を開始、翌2006年には、羽田空港ターミナル駅の有人改札路で乗降客数を数えるためのセンサとして初の社会実装を果たしました。そして2010年、大手鉄道事業者から、「東京・都心部路線駅へのホームドア設置に向けて、従来品より高精度なセンサを搭載したホームドアを開発、設置したい」との要求があり、ホームドア向けに「アンフィニソレイユ」の改良研究に取り組みました。
従来のホームドア用支障物センサの多くは、レーザ光をビーム状に複数本放射し、それを遮ると“何か支障物がある”と検知する光電式が主流でした(図2)。しかし、この方式では、支障物がビームとビームの間に入ってしまうと検知できないため、傘などの細いものは検知に抜けが生じてしまう問題がありました。
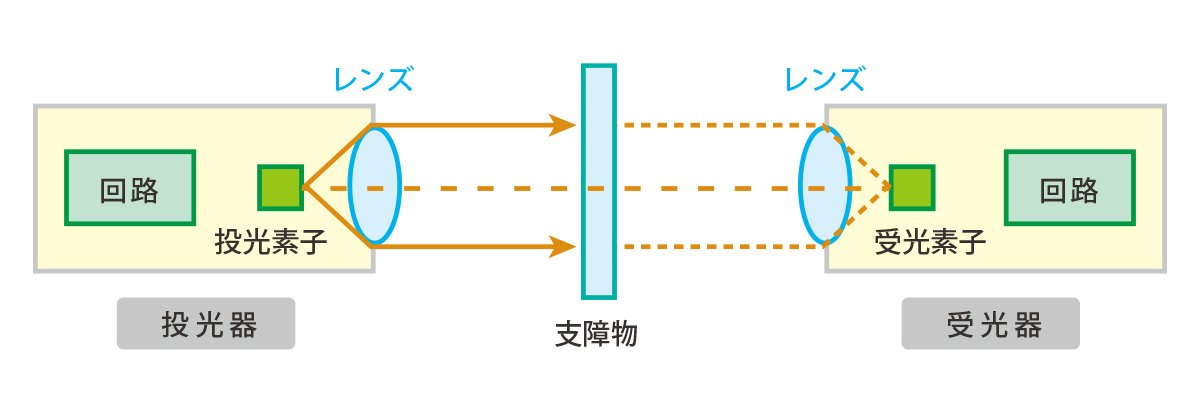
図2 光電式センサの模式図。この投光・受光部の組み合わせが、複数設置され支障物を検知する
一方、「アンフィニソレイユ」は、MEMS光スキャナを搭載し、レーザを対象物に向けて面状に照射するため、検知範囲に抜けが生じません(図3)。また、MEMS光スキャナの特性を引き出すために採用した「同軸光学系方式」により、太陽光などの外乱光に強いという性質も兼ね備えることになりました。
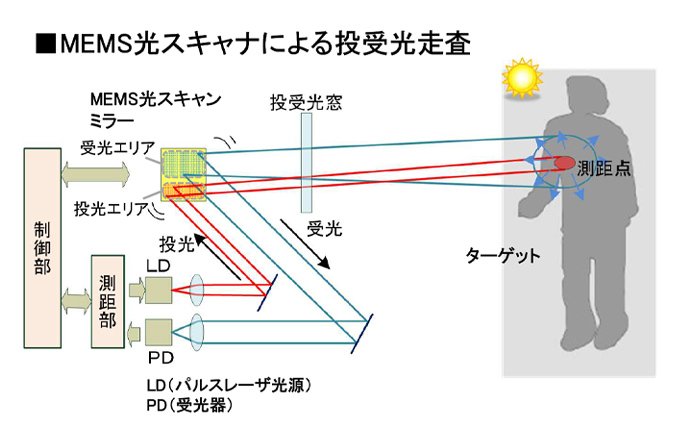
図3 「アンフィニソレイユ」の測距原理(資料提供:日本信号)
「同軸光学系方式」とは、1個のMEMS光スキャナでレーザの投光と受光の両方を行う方法を指します。受光視野が常に投光軸に一致しているため、走査したそれぞれの方向の受光視野角が狭くなり、一見デメリットのようですが、周辺の光に邪魔されることがないことから、太陽光など外乱光に対する耐性能が高まります(図4)。
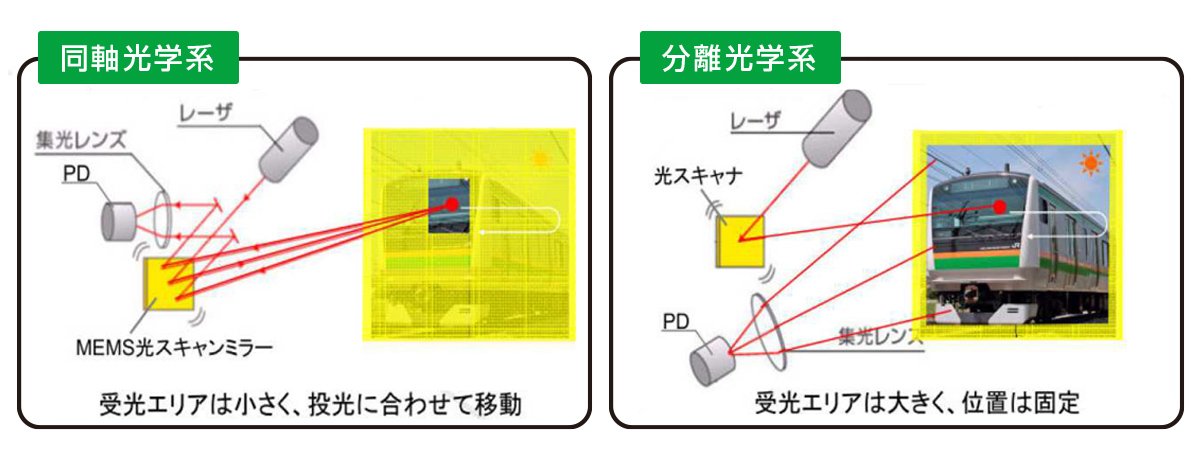
図4 「同軸光学系方式」(左)と非同軸系の「分離光学系方式」(右)の比較模式図(資料提供:日本信号)
川崎さんと同じく日本信号でMEMS開発に関わってきた、宇都宮事業所スマートシティ統括技術部スマートセンシング技術部担当部長の猪俣宏明さんは、「『アンフィニソレイユ』は強い日差しの下でも、車両とホームの間の空間に残されたものが、傘の先のような数ミリ程度のものであったとしても検知することができます」と説明します(写真3)。
大手鉄道事業者での採用をきっかけに「アンフィニソレイユ」はホームドア用3D距離画像センサとして評価が高まり、順調にシェアを伸ばしていくことになりました。

写真3(左)ホームドアに実装された「アンフィニソレイユ」。(右)欠き取り部分に配置されている。日本信号宇都宮事業所の試験エリアで、普段は見ることのできない電車の走る線路側から撮影
MEMS光スキャナの独自性と検知能力が、NEDOプロジェクトメンバーの目に留まって
さて、日本信号と大手鉄道事業者の間でホームドア用センサの開発が進められていたちょうど同じ頃、千葉工業大学・未来ロボット技術研究センター所長の古田貴之さんと、産業技術総合研究所・フィールドロボティクス研究グループ(当時)の加藤晋さんは、NEDO「生活支援ロボット実用化プロジェクト」で車いす搭乗型ロボットの研究開発に取り組み、ロボットに搭載する安全装置の「周辺環境センサ」を探していました。
古田さんと加藤さんは、さまざまなセンサを集めてその性能を評価して行くうちに、「アンフィニソレイユ」を知ることになりました。調べてみると、MEMS光スキャナを応用した仕組みや、その検知能力の高さがわかり、「アンフィニソレイユ」に強い関心を寄せるようになりました。
猪俣さんは、「当時、MEMSでレーザスキャンするセンサは、『アンフィニソレイユ』くらいしかありません。そのためプロジェクトのメンバーにも斬新に映ったのでしょう」と話します。
2010年末に古田さんから声がかかると、川崎さんはすぐにプロジェクト参画を決断しました。そして年明け1月には、既存メンバーのアイシン精機株式会社、オプテックス株式会社、株式会社ヴィッツ、千葉工業大学とともに、車いす搭乗型ロボットの研究開発グループに同席して机を並べることとなりました。
その当時のことを振り返って川崎さんは話します。「『アンフィニソレイユ』の今後の展開を考えたとき、私はぜひ安全認証を取りたいと思っていました。そのために何が足りなくて、どういうことを解決しなくてはならないか、“安全センサに求められる機能要件”を学びたいと思っていたところでした。ですから生活支援ロボットプロジェクトの"安全"について考える研究は、まさにうってつけの機会でした」
川崎さんらは「アンフィニソレイユ」のホームドアへの搭載に続いて、駅ばかりでなく、踏切の障害物検知センサなど、鉄道運行自体への「アンフィニソレイユ」の展開を計画していました(図5)。しかし、多くの旅客を載せる車両が行き来する運行分野は、ホームドアより格段に厳しい安全基準の達成が必要であり、それには「アンフィニソレイユ」と“安全”の関わりを、とことん突き詰める必要を川崎さんらは感じていたのでした。
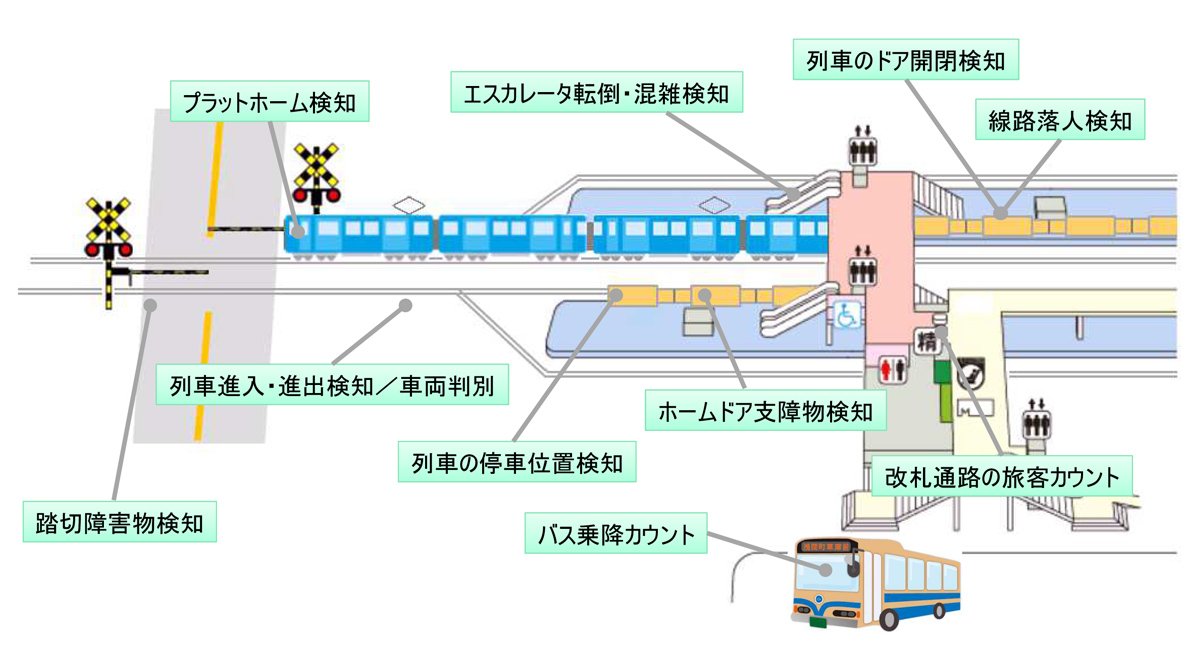
図5 「アンフィニソレイユ」の鉄道分野での活用例(資料提供:日本信号)
プロジェクトの突破口
BREAKTHROUGH
創造力でリスクを洗い出す
本プロジェクトでは、車いす搭乗型ロボットの実用化を目指していました。この搭乗型ロボットが、一般の町なかを走行する際に安全を保証する“技術”をどうすれば開発することができるのか? それにはまずロボットの走行・使用中に、どのようなリスクに出くわす可能性があるのか、それを漏れなく洗い出さなくてはなりませんでした。
プロジェクト内で実際にその作業に当たった猪俣さんは、「“安全技術”といわれても最初は何のことかわかりませんでした。しかし、いろいろと話を聞くうちに安全の研究も面白そうだと思うようになりました」と当時の心境を振り返ります。
「ところが最初に参加した二泊三日の合宿で、“大変なことをすることになってしまった”と、面食らいました。リスクを可能な限り洗い出すための合宿でしたが、二泊三日だけでは時間が足りず、メンバー全員が、かなりの宿題を持ち帰えらなければならなくなりました」(猪俣さん)
リスクの一例を挙げると、町中の電信柱があります。ロボットがそれを障害物として認識できずに衝突してしまったら? 大きさ、表面の質感、光沢などが異なる場合に、それを「アンフィニソレイユ」が同じように検知できるのか? もし電信柱には衝突しなかったとしても、次の障害物が隠れていて、それもロボットが認識して回避できるのか?
このように発生の可能性があるリスクを網羅的に挙げていくと、その項目はどんどん枝分かれして行って数千にも及ぶことになります(図6)。
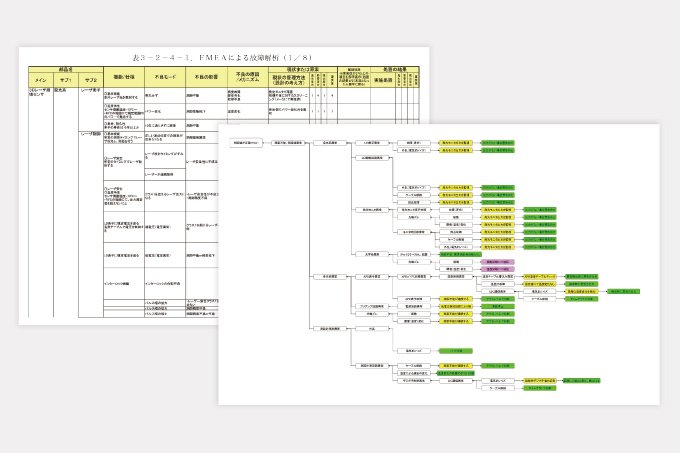
図6 リスクの洗い出し例(イメージ)(資料提供:日本信号)
「リスク項目の洗い出しには優れた創造力が必要です。そうでないと可能性を網羅できません。技術者としてスキルが試されるときです」と川崎さん。一方、実際に洗い出しを行った猪俣さんは、「いつになったら終わるともわからない、気の遠くなる作業でした」と言います。
次に、洗い出されたリスク項目を検討しますが、項目全てを検討することはできませんから、優先順位を付ける必要が出てきます。
具体的には、リスク項目の「①影響度合い」「②発生度合い」「③検出度合い」の三つについて評価して、点数を付けてゆき、それを掛け合わせた数字が大きいものを “処置すべきリスク項目”としました。
もっともこの点数付けもリスク項目判断基準も、あらかじめ決まった方式があったわけではなく、参加者たちで、その方法論の是非から議論して、リスク項目の検討作業を進めました。
そして、検討・処置すべきだと判断されたリスク項目については、茨城県のつくば市にある「生活支援ロボット安全検証センター」の安全確認施設を使って、実際に安全検証実験を行いました(写真4)。
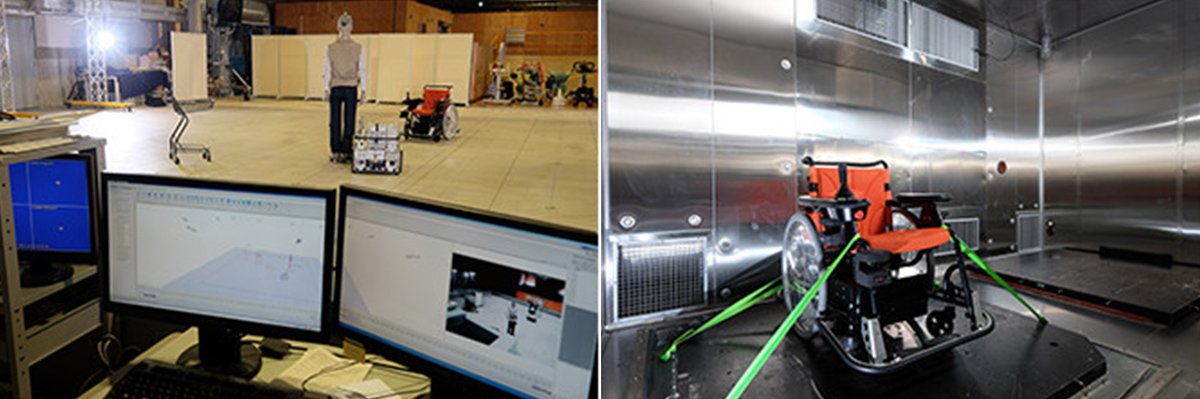
写真4 茨城県つくば市にある「生活支援ロボット安全検証センター」で行われる安全性試験(イメージ)
参照:NEDOプロジェクト実用化ドキュメント「安全安心な生活支援ロボットの開発を支える規格と認証体制を整備」
「検証センターで試験すると、障害物に近づくと時速1㎞まで減速するはずが、スピードが落ちなかったことがありました。理由は障害物を『アンフィニソレイユ』が上手く検知できなかったからでした」(猪俣さん)
このように実際に試験をしてみると新たな課題が見つかることもありましたが、「アンフィニソレイユ」が関わる課題の多くは、装置そのものを改良することなく、センサを動かすプログラムのアルゴリズムを書き換えることで解決できました。
「アンフィニソレイユ」自体が故障したら? 自己健全性モニタの必要性が明らかに
徹底的にリスクアセスメントを行う中で、前述の「電信柱」のような走行時の外部環境に関するもの以外に、もう一つ重要な検討事項があることを見出しました。それは「アンフィニソレイユ」自体が壊れた場合、その事態をどうやって発見し、どのように安全を確保するかという点です。
「アンフィニソレイユ」はおおまかに言って、「レーザ」「MEMS光スキャナ」「受光素子」(前掲の図3参照)から構成されています。各部それぞれに不具合が起こる可能性があるため、リスクを網羅するには、「①レーザは設計通りに放射しているか」「②MEMS光スキャナのミラーが設計通りに動作しているか」「③受光素子が機能しているか」の3点の健全性を保証しなければなりません。
一例を挙げると、もしレーザ放射出力の低下で返ってくる反射光の強度が下がったり、MEMS光スキャナの走査振れ角が小さくなったりした場合、今まで見えていたものが見えなくなります。そうなると検知範囲が想定より小さくなり、最悪、障害物を見逃してしまうことにもつながります。
ホームドアのように取り付け場所が固定されていて移動しなければ、あらかじめホーム上の柱などを対象物に決めて、受光側の出力を見てこのような現象が観察されるかどうかを調べ、「アンフィニソレイユ」が健全に動作しているかを確認できます。
しかし移動する搭乗型ロボットの場合は、自己健全性を確認するための目印(対象物)を、あらかじめ決めておくことはできません。そこで川崎さんらがたどり着いた解決策は「アンフィニソレイユ」自体に自己健全性をセルフチェックする機能を内蔵することでした。
簡易な「自己健全性モニタ」で、セルフチェック実現
いくつかの試行錯誤を経て行き着いたその仕組みは極めてシンプルなものに集約されました。外部の柱の代わりに「アンフィニソレイユ」の正面ガラスに反射物を付け加えて、それを自己健全性確認のための目印(対象物)とすることにしました。
最新型のFX10sの正面ガラスの右下には、三角形のシールのようなものが貼られています。ここに投光したレーザが反射、受光部でその状況をモニタすることで「アンフィニソレイユ」の自己健全性をチェックしています(写真5)。

写真5 自己健全性モニタを搭載する最新型「アンフィニソレイユFX10s」。正面ガラスの右下の三角形が自己健全性チェックのために貼られた特殊シール
原理を文字で読んでしまえば何気ないことですが、この形状に至るまでには、「NEDOプロジェクトで身につけた、安全性やリスクアセスメントの知見が総動員されている」と川崎さんは説明します。
2013年のプロジェクト終了後から2020年の現在まで、この自己健全性のセルフチェック機能は、改良に改良が重ねられてきました。わかりやすい例が外観です。FX10sは、プロジェクト当時のFX8から2世代を経て、正面ガラスが曲面から平面に変更されています。
川崎さんは、「平面ガラスは曲面ガラスより加工コストがかからないという理由もありますが、自己健全性モニタを内蔵するにあたって、平面ガラスの方が有利だったことが最大の理由です」と説明します。
そもそもFX8の正面ガラスが曲面だったのは、投光したレーザがガラス面に正反射して受光素子に入らないようにするためでした。平面ガラスだと正反射を避けるには、レーザに対してガラスを斜めに設置する必要があり、装置筐体の大型化が懸念されました。
「アンフィニソレイユ」は単独で利用される装置ではなく、ホームドアなどに取り付けられて使用するため、少しでも小型化することが、FX8までの最優先課題でした。しかしNEDOプロジェクトでの安全性研究を経て、自己健全性のモニタリングの重要さを理解した川崎さんらは、あえて平面ガラスの使用に踏み切りました。
移動体に搭載された「アンフィニソレイユ」が自己健全性をモニタリングするためには、前述のとおり外部ではなく、「アンフィニソレイユ」内部にセンシングする対象物を置く必要があります。しかし、対象物の設置位置によっては、測定範囲に自己健全性モニタ用の対象物が陰を作り出し、外環境をセンシングできない無効になってしまう画素が生じてしまいます。
投光部・受光部からモニタ用対象物を少しでも遠くに置ければ、無効になってしまう画素を減らすことができますが、曲面ガラスではそれが難しいため平面ガラスへと変更しました(図7)。
曲面ガラスの時には10%ほどだった無効になってしまう画素は、平面ガラスにしたことで3%にまで抑えられました。一方、筐体を大きくしたくなかった川崎さんらは、電気回路部分を改良、FX8とさほど変わらない大きさまで小型化できるように努力しました。
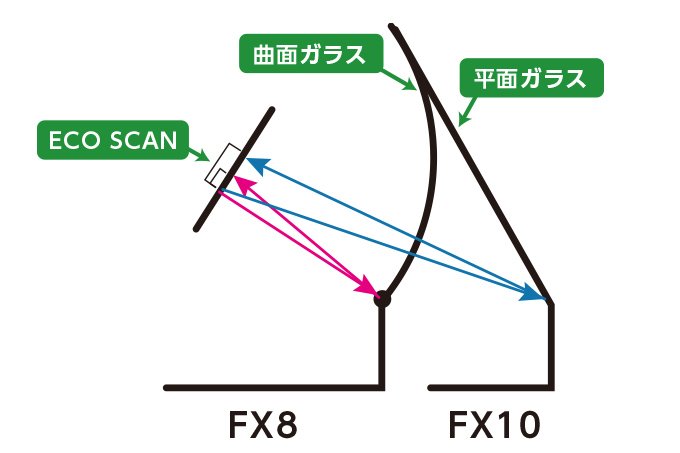
図7 曲面ガラスと平面ガラスの反射・投光距離の違い
コロンブスの卵のような発想で実現した「自己健全性モニタ」ですが、その簡易さから、製品価格や堅牢性、重量、既存品との互換性などにも優れていて、「アンフィニソレイユ」のシェアの拡大と維持に貢献しています。
開発のいま、そして未来
FOR THE FUTURE
「アンフィニソレイユ」が求められる場所を探して建機、農機、ロボットへと展開
自己健全性モニタの特殊シールは、FX8の一部に試験的に貼られ、FX10sから標準装備となりました。それは「アンフィニソレイユ」が、ホームドアなどの固定物から移動体へ、その利用範囲を拡大していくためでした。
事実、「アンフィニソレイユ」は建設機械や農業機械での利用が拡大しています。一例を挙げると、建設機械メーカーのコベルコ建機株式会社では、自社建機の「事故ゼロ」を目指して周辺検知用センサを探した結果、20tクラスのパワーショベル「SK200」に「アンフィニソレイユ」を採用しました(写真6)。

写真6 「アンフィニソレイユ」を採用したコベルコ建機のパワーショベル「SK200」(写真提供:コベルコ建機)
SK200には「アンフィニソレイユ」が4台搭載されていて、死角エリアの人や障害物を検知し、自動で機械の旋回や走行を減速・停止する衝突軽減システムになっています(図8)。
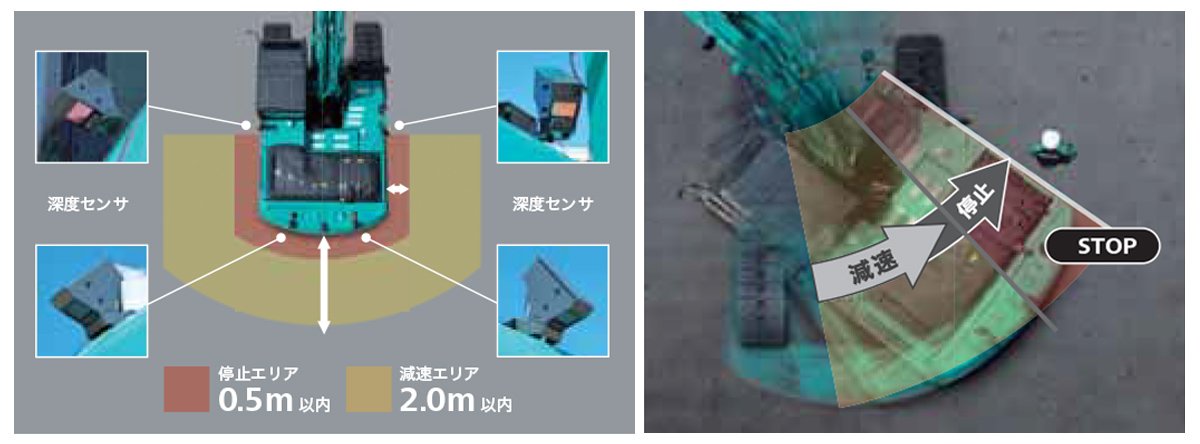
図8 「アンフィニソレイユ」を利用してSK200に取り入れられた衝突軽減システム(資料提供:コベルコ建機)
また、空港にあるボーディングブリッジへの搭乗ゲートで、小さな子どもが誤進入してしまうのを見逃さないための検知システムの開発も進んでいます。航空会社では当初、カメラを利用したシステムを考えていましたが、検知精度に限界を感じ、立体物を3次元で正確に捉えられる「アンフィニソレイユ」のほうがより的確に子どもを発見できるとして、採用を決めました。
さらに、NEDOプロジェクトで取り上げたタイプとは異なりますが、ロボットへの「アンフィニソレイユ」の応用展開も、日本信号では進めています。同社の自動床清掃ロボット「CLINABO(クリナボ)」は、清掃エリアの地図作成と自己位置認識の機能を備えた清掃ロボットで、決められたルートに沿って自動走行しながら、床に水と洗剤を撒きパッドでこすり、後方で水を吸い上げて床を磨き上げていきます(写真7)。
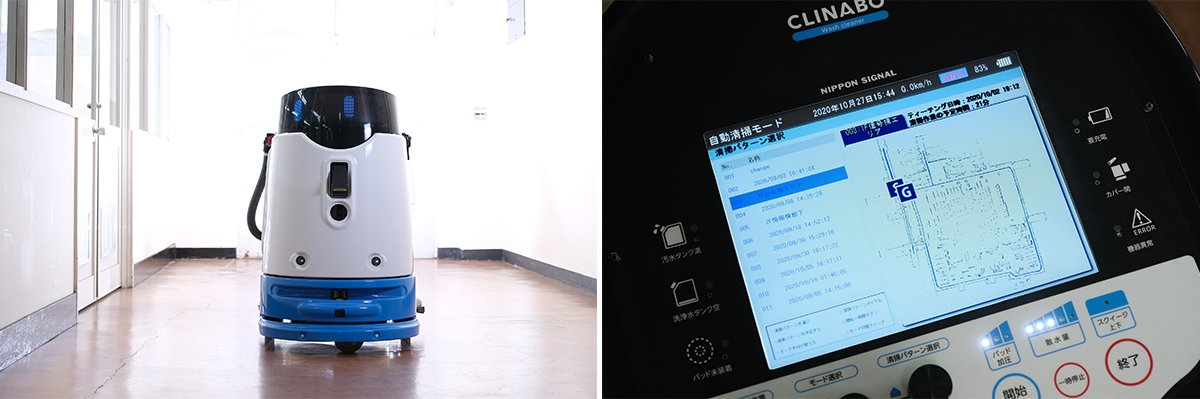
写真7 左:自動床掃除ロボット「CLINABO」、右:「CLINABO」の操作画面
自動運転のため「CLINABO」には、さまざまなセンサが搭載されていますが、「アンフィニソレイユ」もその一つとして重要な役割を担っています。通常、自己マッピングにより決められたルートを安全に走行する「CLINABO」ですが、まれに段差を認識ができなくなることがありました。
段差を誤認識した場合、最悪、階段から「CLINABO」が転げ落ちてしまう可能性もあります。このような事故は絶対にあってはならないので、階段の段差を検知するようにと「アンフィニソレイユ」を搭載することにしました(写真8)。

写真8 「CLINABO」の正面に取り付けられた「アンフィニソレイユ」
「CLINABO」は、東京・池袋の東武百貨店で実際に使用されているほか、深夜、首都圏の大型ターミナル駅などで実証実験を繰り返しています。当然、「CLINABO」の落下事故は起きていません(写真9)。
川崎さんは「今は、まだ階段の段差を見ているだけです。次は、進行方向に支障物があった場合、『どいてください』と言いながら減速していき、支障物がなくなったら走り出すような制御も可能にしてゆきたい」と話します。

写真9 段差を自動検知して停止した「CLINABO」
「15年前の開発当初は、その用途すらはっきりしていなかった」(猪俣さん)という3D距離画像センサ「アンフィニソレイユ」ですが、「NEDOプロジェクトを経て、その安全性・信頼性を高次元で保証する知見を得ました」と川崎さんは言います(図9)。
「新分野に参入するとき、NEDOプロジェクトを通して知り合った企業や団体とのつながりがとても役立っています。普段から情報交換を行うなど、プロジェクトのメンバーとは今でも有効な関係性が続いています」(川崎さん)
プロジェクトを通じて更なるレベルアップに成功した日本信号の3D距離画像センサ「アンフィニソレイユ」は、活躍の場をますます広げています。

図9 「アンフィニソレイユ」の開発年表(資料提供:日本信号)
開発者の横顔
FACE
安全技術向上と“めぐり合い”の好機に
川崎栄嗣さんは自動車関連の前職で安全意識を培ってきたこともあり、本プロジェクトを「自社のセンサを安全技術として完成させる好機」と捉えて参加を決めました。その成果は「アンフィニソレイユ」に十分生かされていますが、川崎さん個人としてのプロジェクトに参加してよかった点について聞くと、「貴重な“めぐり合い”があったこと」を真っ先に挙げます。
「グループには、普通、絶対に一緒に仕事をしないコンペティターもいました。とは言え、同じものを一緒に作る、言わば戦友のようなものですから、けん制しながらもいつの間にか腹を割って話し合う仲になれました。そうしたプロジェクト内での“めぐり合い”が、自分の世界を大きく広げてくれたと感謝しています」

日本信号株式会社 宇都宮事業所
スマートシティ統括技術部長 兼
スマートセンシング技術部 部統括担当
川崎 栄嗣 さん
苦労して開発した安全技術を次へつなげる
猪俣宏明さんは、入社以来、「アンフィニソレイユ」のようなセンサの事業に携わってきました。その経験と力量を買われ、NEDOプロジェクトでは、実際にリスクの洗い出しを任されました。また、それらを検証する実験も行いました。
「いったい何をやるのだろう」というところからのスタートでしたが、プロジェクトの4年間で、“安全技術”を確立させるまでに至りました。
当時を振り返って「正直、しんどかったですよ」と猪俣さんは言います。その一方で「プロジェクトでリスクアセスメントの考え方や方法論を研究したおかげで、『アンフィニソレイユ』をはじめ開発製品の安全認証取得への道も大きく開けてきました」と話します。
また川崎さんと同じく“めぐり合い”の喜びについて猪俣さんは言います。「それまでは外部の人と会うことなどほとんどありませんでしたが、プロジェクトに参加して、同じグループのアイシン精機さんの愛知の工場に出向いたり、つくば市の生活支援ロボット安全検証センターで実験をしたり、本当にたくさんの人たちと知り合いましたし、これも貴重な経験でした」

日本信号株式会社 宇都宮事業所
スマートシティ統括技術部
スマートセンシング技術部 担当部長
猪俣 宏明 さん
 なるほど基礎知識
なるほど基礎知識
対象物との距離を立体(3D)で捉える方法
3Dセンサは、奥行方向の距離計測と水平・垂直方向の面走査を行うことで対象物を捉えます。その方式にはいくつかのパターンがあります。
まず画像の取得方法で代表的な方法は次の3方式があります(表1)。
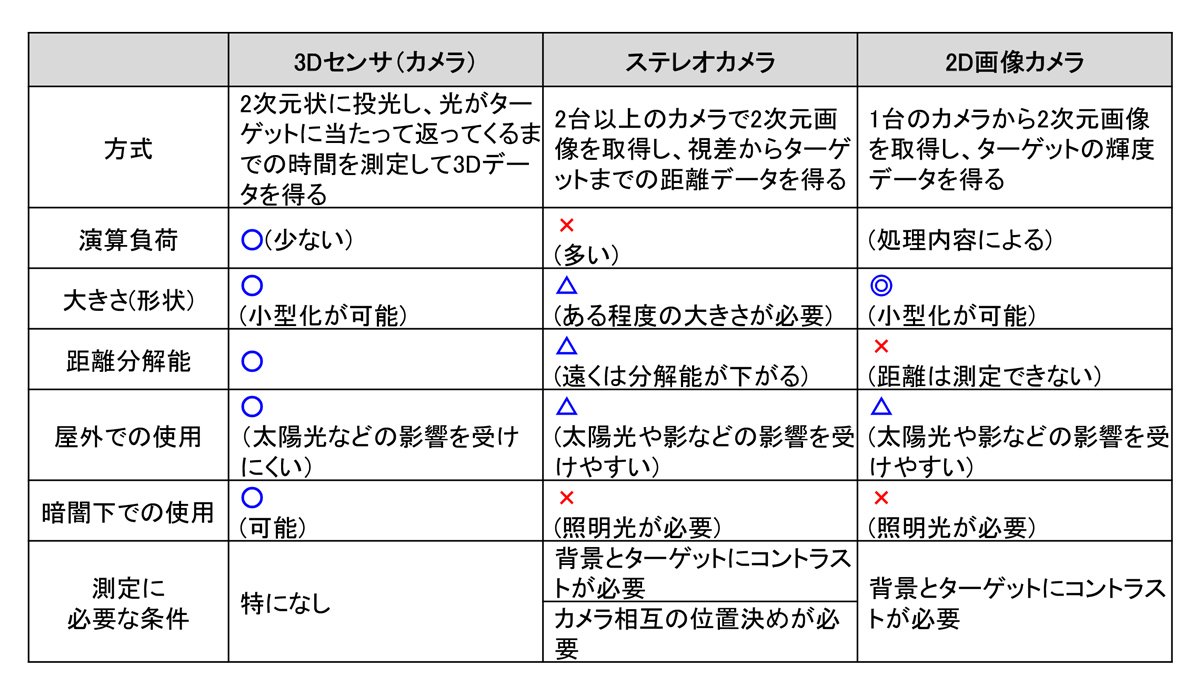
表1 画像取得方式による特徴の比較(資料提供:日本信号)
また、距離データを得る代表的な方法には次の2方式があります(表2)。
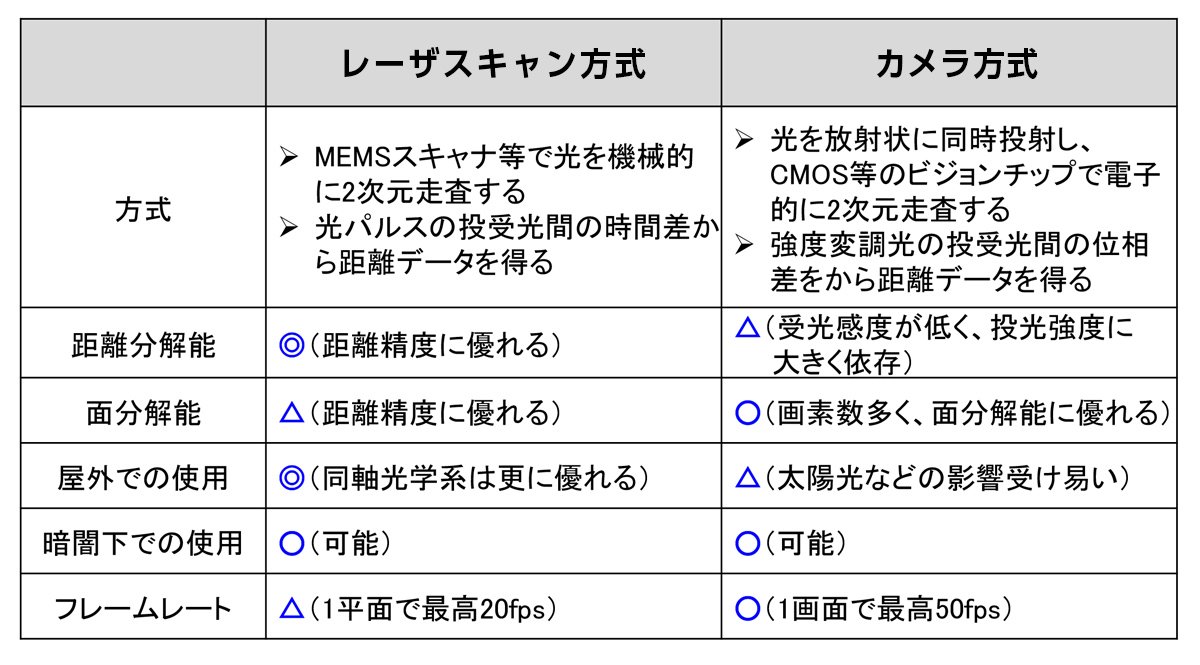
表2 距離データ取得方式の比較(資料提供:日本信号)
日本信号の「アンフィニソレイユ」は、「3Dセンサ」と「レーザスキャン方式」を組み合わせて、対象物を捉えています。
「アンフィニソレイユ」が立体物を捉える仕組みは
「アンフィニソレイユ」では、まずレーザを対象物に向けて照射し、その光が行って対象物に当たって返ってくるのを受光素子で捉えます。こうして得られる光の飛行時間を基に対象物までの距離を測定し(TOF方式:Time of Flight)、その1点1点のデータを集めて対象物を3次元的(3D)に捉えます(図10)。
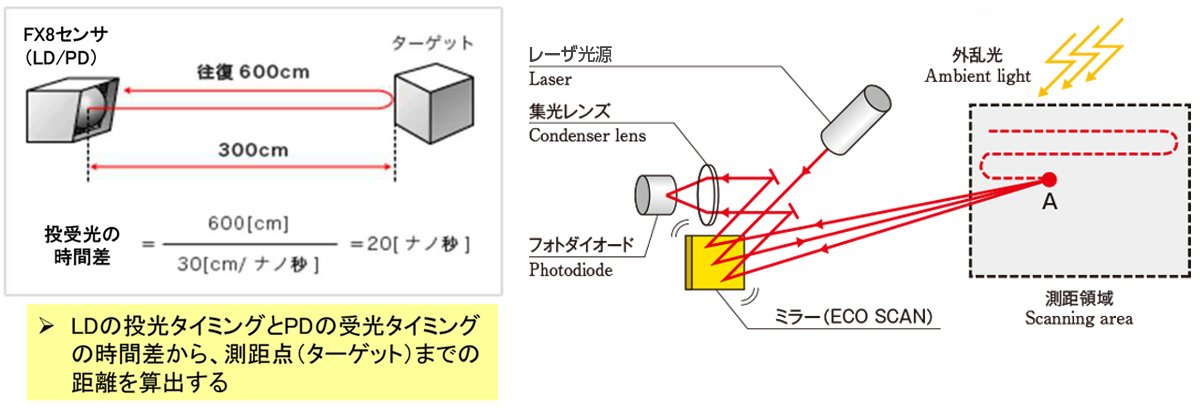
図10 TOF方式の模式図(資料提供:日本信号)
さまざまな方向にレーザを照射するために、レーザを走査しなければなりません。この走査に「アンフィニソレイユ」ではMEMS光スキャナ(商品名:ECO SCAN)を使用しています(写真10)。
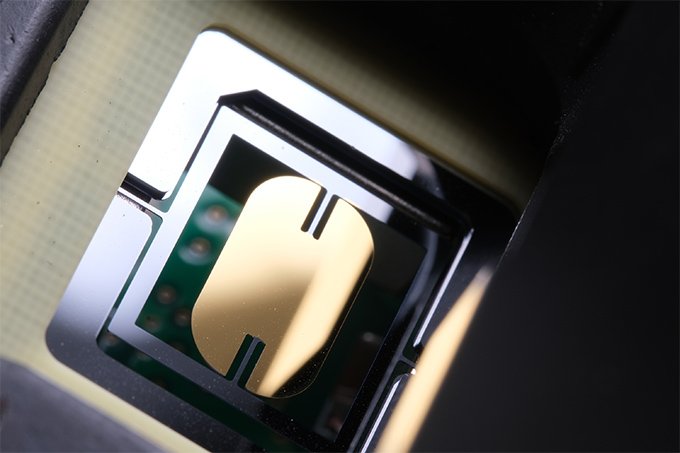
写真10 鏡状になっている「ECO SCAN」
「ECO SCAN」には、摺動部がないため、摩擦による消耗と故障がなく高い耐久性が実現されています。また、近赤外パルスレーザを使っているので、昼夜を問わず使用可能です。さらに「アンフィニソレイユ」は、1個の「ECO SCAN」でレーザの投光と受光の両方を行うことで強い外乱光を受けても正確に対象物を捉えることができます(図11)。
「アンフィニソレイユ」はこうした仕組みで、「①3次元(3D)形状認識の性能が高い」「②摺動部がなく耐久性に優れている」「③昼夜を問わず使用可能」「④外乱光に強い(耐外乱光性)」といった特色を備えています。
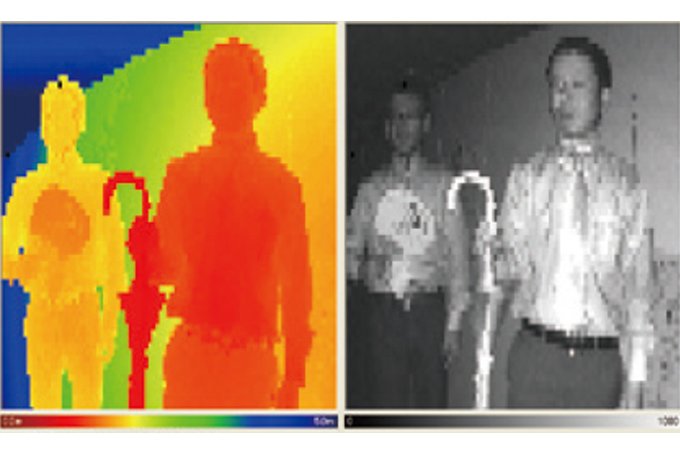
図11 スキャン結果のイメージ。右は光量画像で、左が距離画像、赤色が濃いほど距離が近い(資料提供:日本信号)
 NEDOの役割
NEDOの役割
「生活支援ロボット実用化プロジェクト/安全技術を導入した搭乗型生活支援ロボットの開発」
(2009〜2013年度)
(NEDO内担当部署:ロボット・AI部)
本プロジェクトでは、対人安全技術の確立が大きな課題となっていた介護・福祉等の生活支援分野向けのロボットについて、世界に先駆けて、安全技術の研究開発と安全性検証手法の研究開発を実施しました。
NEDOは、企業・大学・公的機関・業界団体の成果を結集できるような実施体制を構築し、研究開発を推進しました。具体的には、移動作業型(操縦が中心)、移動作業型(自律が中心)、人間装着型、搭乗型の4タイプについて、安全技術を搭載したロボットの開発にも取り組むとともに、検証・試験の拠点として「生活支援ロボット安全検証センター」を開設し、安全性に関するデータや知見を集約しました。こうした活動がもとになり、生活支援ロボットの国際安全規格がISO13482として発行されました。また、各企業における生活支援ロボットや関連技術の事業化にもつながりました。