
危険を伴う山岳トンネル工事において重大な災害の多くは、地山が崩れないよう鋼材で支える支保工建て込み作業※1と、掘削面(切羽:きりは)直下での火薬の装填・結線作業で発生しています。重機を使用する支保工建て込み作業では遠隔化や自動化が進んでいますが、危険性が高い材料や細かい脚線※2を扱う火薬の装填・結線作業は繊細な力加減や手指の感覚が必要なため、安全対策を行いながら手作業で施工しているのが実情です。
NEDOは「官民による若手研究者発掘支援事業」の一環で、慶應義塾大学の野崎貴裕准教授らの研究グループと株式会社大林組と共に、遠隔で力触覚を再現するリアルハプティクス®技術を応用し、火薬の装填・結線作業を遠隔化・自動化する自動火薬装填システムの開発に成功しました。
本システムは、切羽から離れた安全な場所で操作する「遠隔装填技術」と、そこから伝送される力触覚のデータを利用した「自動装填技術」の2つの技術から構成されます。「遠隔装填技術」では、切羽のロボット側から切羽から離れた場所に設置したリモコン側に力触覚を伝えることで、あたかも現場で直接作業しているかのような直感的な操作で、火薬の装薬孔への円滑な挿入や適切な力加減での火薬の押し込みが可能となります。
さらに、「遠隔装填技術」で得られたロボット側の火薬装填時のデータとリモコン側の遠隔操作データを活用した「自動装填技術」では、作業者の動作を再現し、装填作業を自動化することで、作業の効率化と生産性の向上が期待できます。
今後は、実際のトンネル工事現場での実証試験を進めると同時に、切羽との接触を感知しながら自動で脚線を結線する「自動結線システム(特許出願中)」の要素試験を進め、一連の技術の現場適用を目指します。また、各システムを自律学習させることで、トンネル掘削作業の無人化に向けた研究開発も進めます。
NEDOは、リアルハプティクス®技術を応用し、トンネル掘削作業の無人化を目指すことで、安全で効率的な働き方の実現に向けて取り組んでいきます。
※1 地山を保持するアーチ状のH型の鋼材である鋼製支保工を設置する作業
※2 雷管(わずかな熱や衝撃で発火する火薬を筒に込めた火工品)を起爆するための電気を流す線
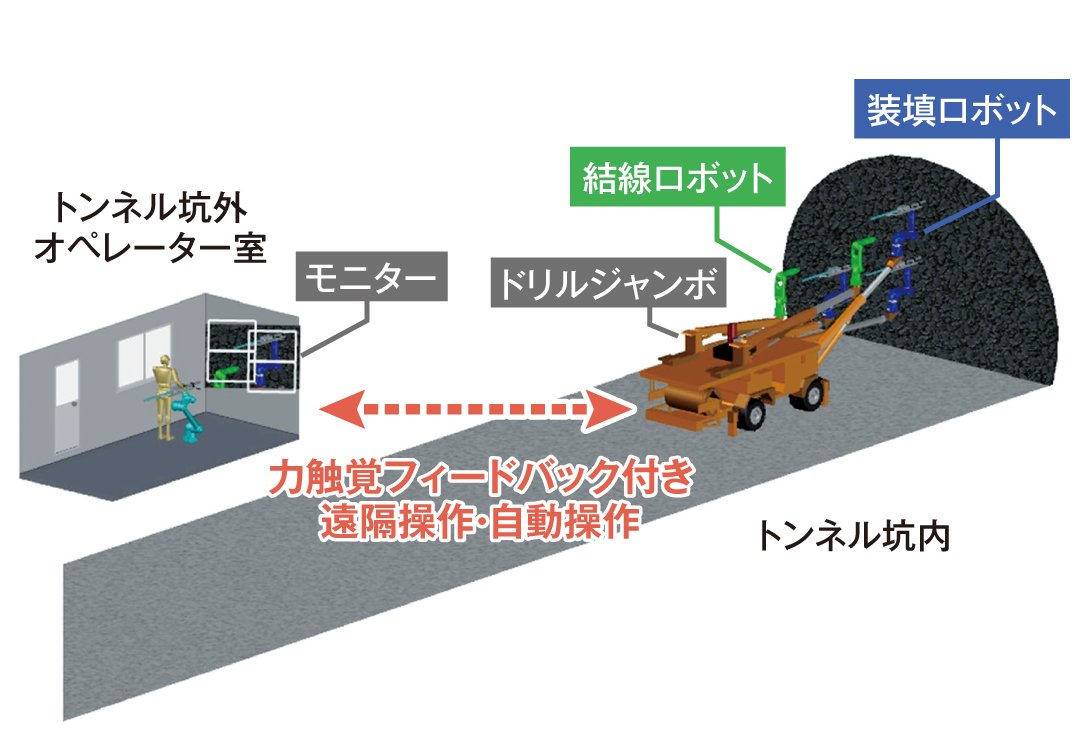
自動火薬装填システム/自動結線システムのイメージ
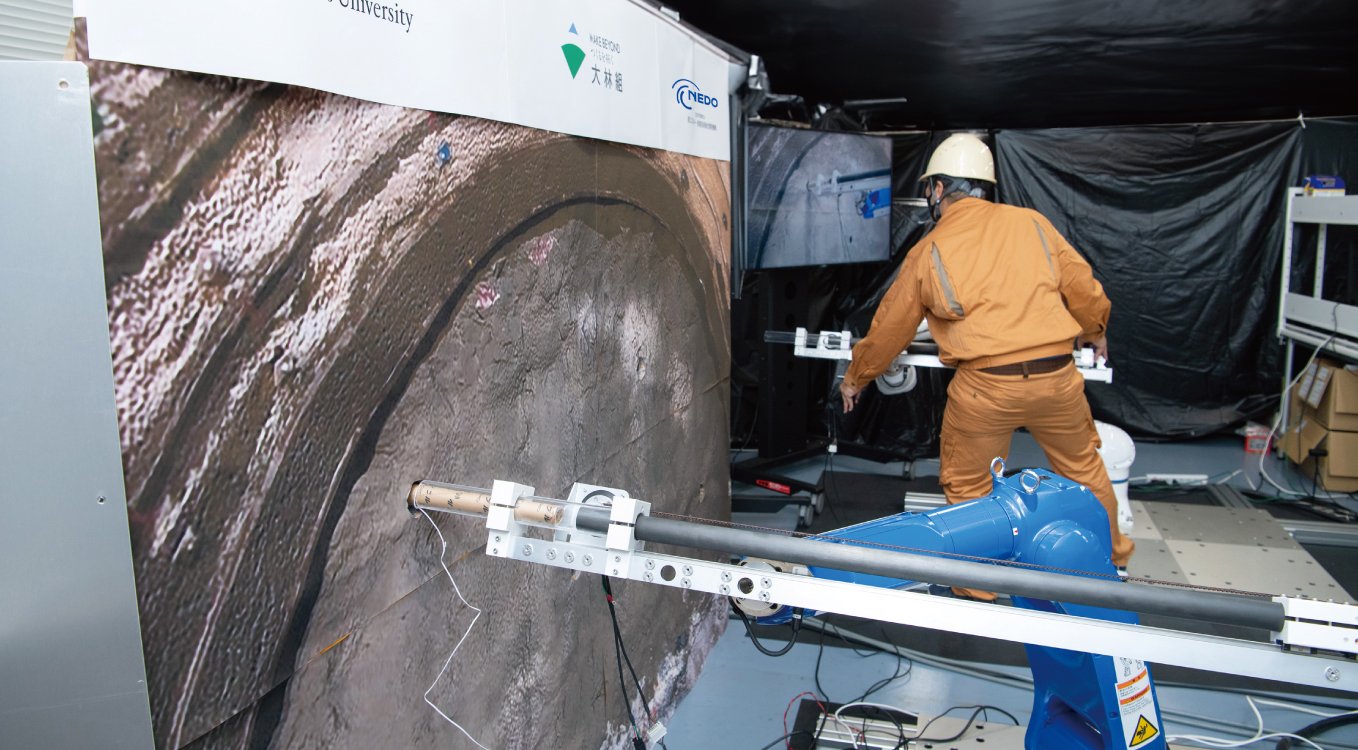
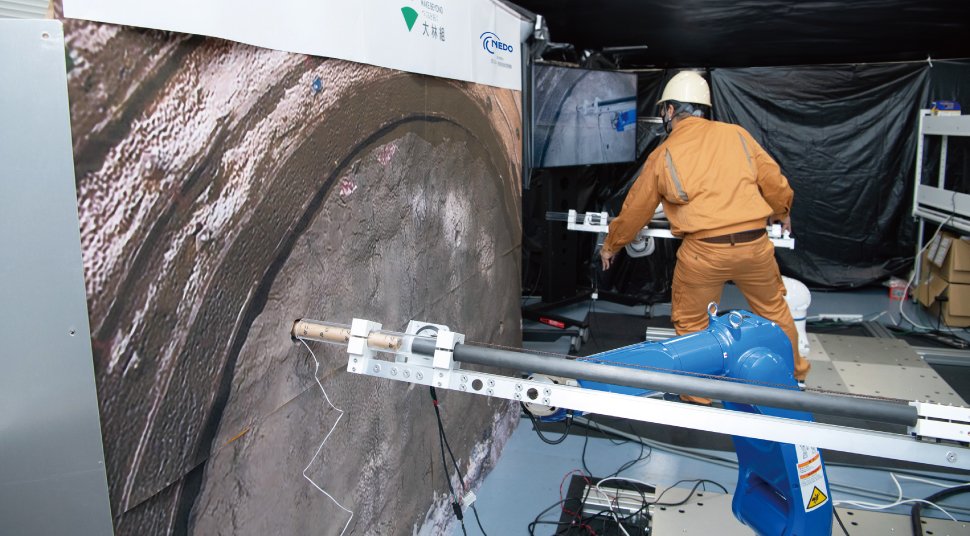
ロボット側から送信される映像を確認しながら、力触覚が再現されたリモコン側を操作することで、実際に火薬を装填しているかのような感触で作業が可能。また、リモコン側で動かした力の入れ具合等をロボット側で再現できる。

従来の火薬装填・結線状況。コンクリートを吹き付けられた掘削面(切羽)の直下で落石防護ネット等の安全対策を行いながら火薬の装填・結線作業を行う。作業中に地山が崩れるなどの災害に巻き込まれないように、遠隔化が求められる。