

 革新的ロボット要素技術分野の成果
革新的ロボット要素技術分野の成果
革新的なロボットを生み出すには、ロボットを構成する個々の要素技術を世界トップレベルに高める必要があります。それは将来的に業界の標準となる技術であり、世界と戦っていける技術です。そこでNEDOは、技術革新の基盤の構築と、研究成果を社会実装につなげることを目指しました。実用化・事業化のフェーズに進んだ研究や、ロボット以外の業界からも注目される成果等、その代表的な事例を紹介します。
 人の手に近い、高性能かつ堅牢性を備えた5本指ロボットハンド
人の手に近い、高性能かつ堅牢性を備えた5本指ロボットハンド
東京都立産業技術高等専門学校
人間のような動きと見た目に特徴
従来、ロボットハンドでさまざまな形状の物をつかむには、関節ごとのセンサーやモーターと、動作ごとに個別のプログラムが必要で、実用性に課題がありました。
そこで開発されたのが、1つの駆動装置のみで複数の指の関節を駆動させる「からくり」を持つ5本指のロボットハンド。見た目も動きも人間の手指に近く、多様な形状の物を持つことができます。産業界の中でも不定形把持の場面が多い物流や食品分野への応用に期待が寄せられています。

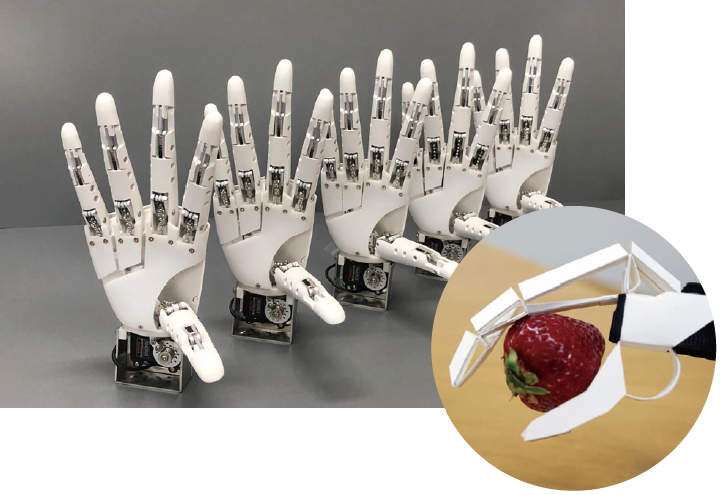
さまざまな形状の物を安定的にかつ優しくつかむことができる5本指ロボットハンド「F-hand」(左)と1枚の紙のみで作られた「オリガミハンド」(右)。
 多様な物体を把持して固定する3本指ロボットハンド
多様な物体を把持して固定する3本指ロボットハンド
ダブル技研株式会社
汎用性の高さでコスト低減に期待
1つの駆動装置で複数の指が連動して動く「からくり」を採用した可変剛性機構付き3本指ロボットハンド「D-Hand Type R」はNEDOプロジェクトを予定より早く切り上げ、2019年より受注生産を開始しています。
特徴は不定形の物を把持し、その状態で関節を固定して姿勢を保持できること。従来は把持する物に応じてロボットハンドを交換して対応していた生産ラインや、多品種を扱う物流倉庫等におけるピッキング作業の自動化、ロボットハンド導入のコスト低減への貢献が期待できます。

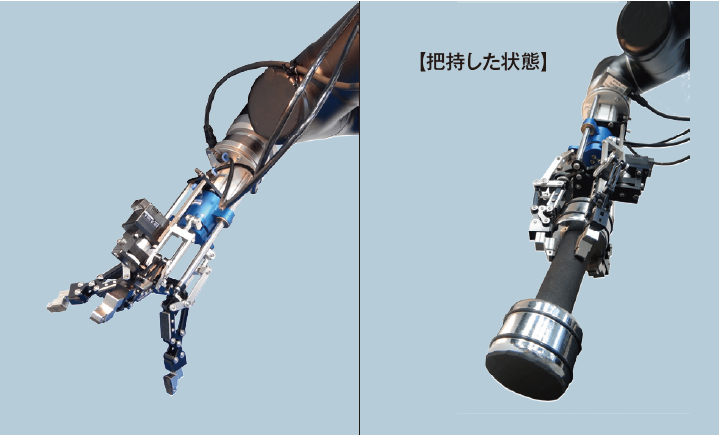
可変剛性機構を持つ「D-Hand Type R」。多品種ピッキング作業や、人間の手首の動きのような柔軟性が必要とされる部品挿入作業の自動化を可能にした。
 スプレー塗布で作るロボット皮膚センサー
スプレー塗布で作るロボット皮膚センサー
熊本大学
ロボット・航空機・自動車等に想定
ロボットが人間と共存するには外部との接触を検知する、人間の皮膚のような機能が必要です。今回開発された「ゾルゲルスプレー法」は、自動スプレー装置で圧電材料を吹き付け、ロボットの表面に膜を形成するというもの。圧電膜は加わった力を電気信号として取り出せるため、周囲との接触の状況を検知するロボット皮膚センサーとして機能します。
また、圧電膜は振動検出にも使用できるので、産業用装置やトンネル、橋梁等、検査が難しいところに塗布すれば、非破壊検査やリモートのモニタリングにも活用できます。

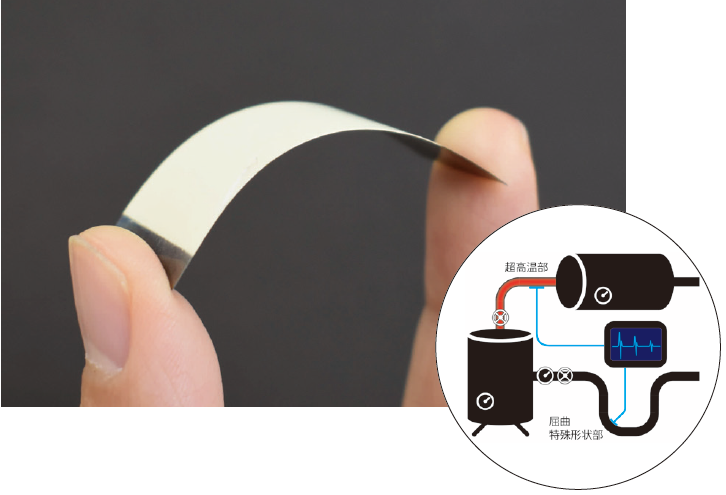
スプレー塗布によりフレキシブルで壊れにくく高温特性にも優れたセラミック圧電膜を作製。幅広い用途での応用が期待される。
 バックドライブが可能な、高効率・高出力アクチュエータ
バックドライブが可能な、高効率・高出力アクチュエータ
横浜国立大学
開発した高効率ギヤをモジュール化
意図しない接触の場合、人間ならば即座に避けるなどの安全行動を取りますが、ロボットは関節に使われている減速機の機能限界でそれができませんでした。この課題を解決し得るのが「バイラテラル・ドライブ・ギヤ」。歯車の歯数や転位係数等を最適化することで動力伝達効率を向上させ、柔軟な逆駆動を可能にしました。これによりロボットの関節が外力に対して柔軟に動くことができるほか、逆駆動によるエネルギー回生の効率も高いことから、電気自動車等ロボット以外の分野からも注目されています。


ハーモニックギヤはモーターから伝えられる力の3割程がロスされるが、バイラテラル・ドライブ・ギヤ(左)はロス1割という高効率化を実現した。右は組み合わせる高出力モーター。
 プロジェクトから企業が誕生!
プロジェクトから企業が誕生!
研究開発成果の実用化・事業化を目指して、本プロジェクトでは企業との連携や研究者自身による起業、新たな市場の創出等を支援しており、これまでにさまざまな企業が生まれました。そのスタートアップの一つがSEQSENSE株式会社。「知識の構造化によるロボットの知的行動の発現研究開発」の成果を生かし、画像認識技術やセンサー技術等の高度なテクノロジーを駆使した自律移動型のセキュリティロボットを開発しています。
「NEDO Startups Future」でもご紹介していますので、ぜひご覧ください。

SEQSENSE社のSQ-2 SECURITY ROBOT。